
 마이페이지
마이페이지 장바구니
장바구니 취소/반품
취소/반품 자료실
자료실

상품상세정보
MG995 호환 서보모터 입니다.
풀메탈 입니다.
무게 : 55g
크기 : 40.7 x 19.7 x 42.9mm
토크 : 8.5 kgf·cm (4.8 V ), 10 kgf·cm (6 V)
속도 : 0.2 s/60º (4.8 V), 0.16 s/60º (6 V)
전압 : 4.8 V a 7.2 V

DC모터는 360도 회전을하며 RC서보모터는 정해진 각도로 이동이 가능한 모터 입니다.
서보모터는 자동화 장치와 큰 로봇에들어가는 모터를 말하며 RC서보모터는 무선조종자동차에 사용하면셔 규격화되고 교육용 로봇에 많이 사용하여 교육용은 대부분 RC서보모터를 사용합니다.
DC모터의 구동원리
자기장으로 모터가 움직이는 원리
실제 모터를 자기장의 흐름으로본 모터 동작
모터는 다양한 종류가 있지만 우리는 RC서보모터를 알아봅니다.
서보모터란?
RC서보모터 규격화 되어있어 작은 형태와 (미니서보, 마이크로서보) 일반형태로 나누어 집니다.
요즘은 토크가 커지면서 더 커진 형태의 모터도 있습니다.
서보모터를 고를때 주의해야 할께 모터로 움직이는게 가벼운지 무게가 실리는지를 체크해야 합니다.
플라스틱 기어로 엄청 저렴한 모터도 있지만 기어가 깨지는 경우를 자주 경험하게 되며
무게가 있는 구동을 하면 더 자주 기어가 깨집니다.
서보모터

DGS288 서보모터

로봇용으로 국내제조제품인 서보모터 입니다.
플라스틱 기어로 되어있습니다.
전압 : 6V
속도 : 60rpm
토크 : 5Kg
MAX 전류 : 1.0A
각도 : 200도
코어레스 양축서보 모터

BM-2301B

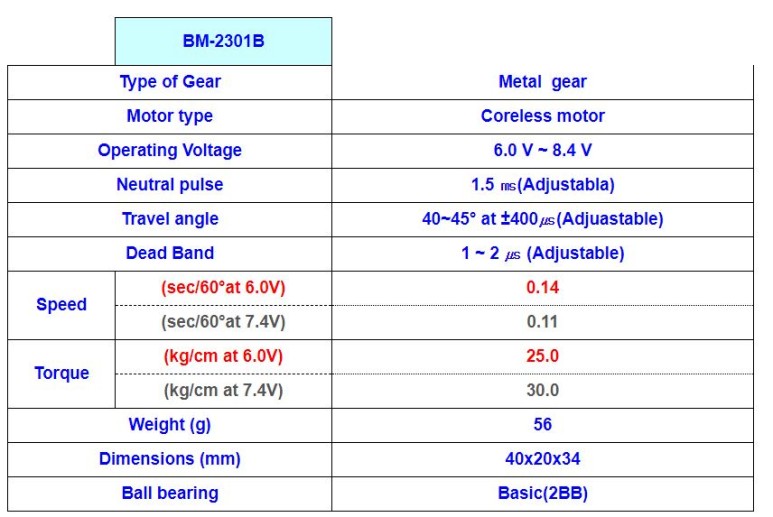
일반 서보모터의 경우 6V이하에서 동작해야 합니다. 6V이상의 전압을 공급하면 서보모터에 들어있는 회로가 고장납니다.
위 모터는 2셀까지 연결 가능하며 토크가 30kg 입니다.
높은 토크만큼 열이 발생하고 냉각을 위해 모터부분이 알루미늄으로 되어 있습니다.
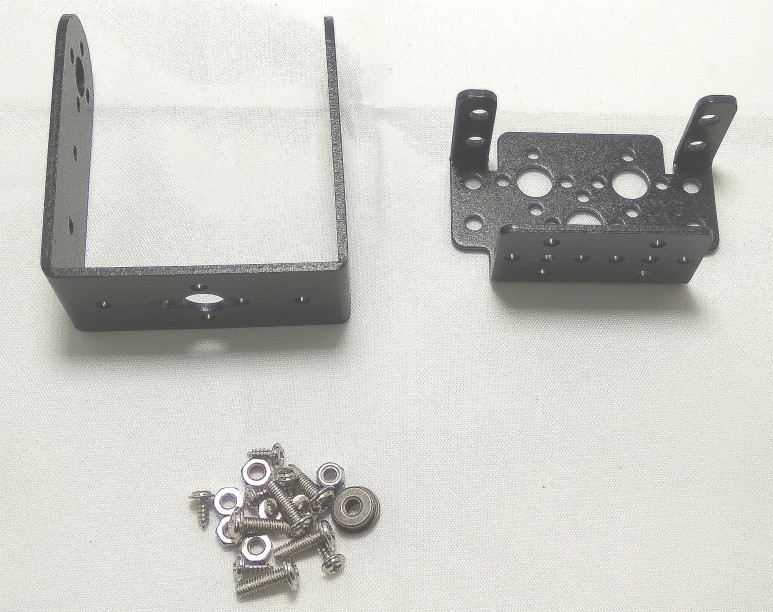
또한 양축서보형태로 되어 있어 양축서보 브라켓을 사용하여 구조물을 튼튼하게 만들 수 있습니다.
모터는 다르지만 이런 형태가 됩니다.


이런 브라켓을 연결 합니다.

DGS-3399



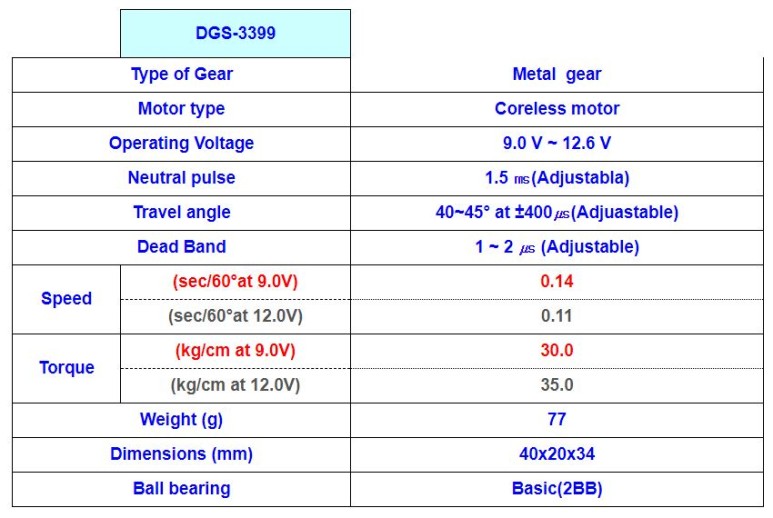
3셀 배터리 연결이 가능하고 더욱 힘이쎈 서보모터 입니다.
높은 토크만큼 발열이 있어 통 알루미늄 케이스로 제작되어 있습니다.
ES08MA2 미니서보모터 입니다.
미니서보 종류가 많이 있는데 저렴하고 기어가 메탈로 되어 있습니다.
플라스틱 기어를 학생들이 사용하기에는 기어파손이 너무 많습니다.
모든 서보모터가 동일하지만 무리한 힘을 가하면 기어가 파손되고 과부하가 오래 걸리면 내부 회로가 파손됩니다.


무게 : 13g
크기 : 23 x 11.5 x 24mm
토크 : 1.6 kgf·cm (4.8 V ), 2.0 kgf·cm (6 V)
속도 : 0.12 s/60º (4.8 V), 0.1 s/60º (6 V)
전압 : 4.8V ~ 6V
MG995 서보모터 입니다.
풀메탈 입니다.
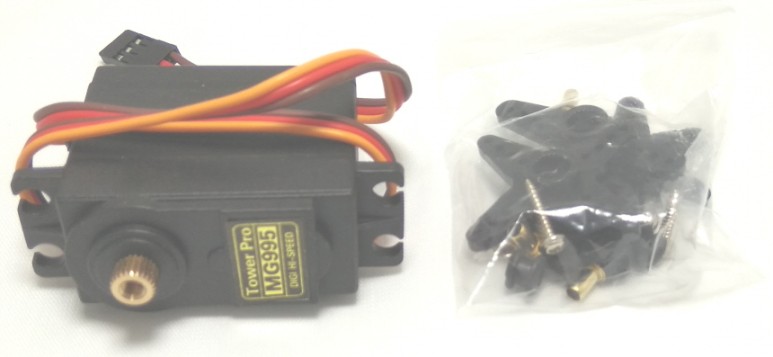

무게 : 55g
크기 : 40.7 x 19.7 x 42.9mm
토크 : 8.5 kgf·cm (4.8 V ), 10 kgf·cm (6 V)
속도 : 0.2 s/60º (4.8 V), 0.16 s/60º (6 V)
전압 : 4.8 V a 7.2 V
동작온도 : 0 ºC – 55 ºC
MG996R 서보모터 입니다.
풀메탈 입니다.


무게 : 55g
크기 : 40.7 x 19.7 x 42.9mm
토크 : 9.4 kgf·cm (4.8 V ), 11 kgf·cm (6 V)
속도 : 0.17 s/60º (4.8 V), 0.14 s/60º (6 V)
전압 : 4.8 V a 7.2 V
동작전류 : 500mA ~ 900mA(6V)
동작온도 : 0 ºC – 55 ºC
서보모터를 사용하여 이런 로봇팔 형태등 다양한 구조를 만들 수 있습니다.
모터를 잡아주거나 연결하는 브라켓이 필요합니다.
다음과 같이 모터 브라켓을으로 구조물을 만들기도 합니다.

서모모터의 종류는 상당히 많이 있습니다. 나에게 맞는 형태로 구입하세요.
대략 코딩하는데 사용한다면 저렴하고 메탈기어 제품을 권장 합니다.
서보모터를 사용하기 위해서는 전원에 상딩히 신경을 써야 합니다.
아두이노 5V에 연결해도 동작 하던데요?
서보모터에 부하가 없으면 구동이 잘 됩니다. 모터에 무언가 연결하고 전류가 많이 흐르면 동작 하려다가 리셋되는 현상이 발생 하기에 높은 전압을 아두이노 입력 전압에 넣고 병렬로 서보모터에 연결해야 합니다.
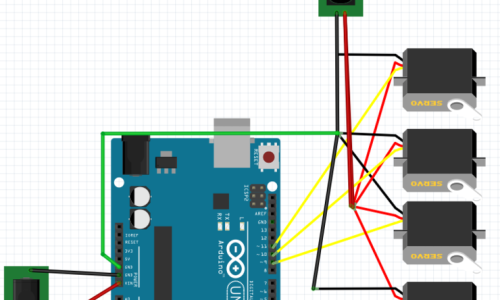
서보모터를 여러개를 5V로 연결해서 리셋되는 영상입니다.
외부 전원을 연결하여 다시 구동하는 부분까지 설명 합니다.
외부 전원 연결에 주의사항은 서보모터의 구동 전압 입니다.
만약 6V서보모터를 사용하면 외부전원이 6V 이거나 6V이상의 외부전원을 공급하고 DC-DC컨버터로 5~6V로 전압을 낮추어 서보모터에 공급해야 합니다.
6V이상의 전압을 공급해도 처음에는 동작을 하니 잘 되는듯 하지만 점점 뜨거워지면서 어느순간 서보모터의 회로가 고장납니다.
이 부분은 검색을 해봐도 좋은 자료가 안 보입니다.
배터리, 전류, 방전률 등을 잘 모르면 9V건전지에 연결했는데 잘 되는데요!
라는 말을 하게 됩니다.
안정적인 로봇구동과, 다수의 서보모터, DC모터 등을 구동하기 위해서는 입력전원의 선택과 모터에 공급하는 전원을 어떻게 구성하는지가 상당히 중요합니다.
레귤레이터의 종류를 잘 정리한 자료 이네요.

위의 레귤레이터는 아두이노에서 자주 사용하는 종류이고 실제 종류는 엄청나게 많습니다.
입력 전원을 아두이노와 레귤레이터에 공급하고 레귤레이터에서 서보모터에 6V로 공급하게 해야 안정적인 동작이 가능합니다.
출력전압이 고정인 제품과 가변저항으로 조정 하는한 제품이 있습니다.
로봇에 많이 사용하는 컨버터 입니다.


6V고정으로 출력하여 서보모터에바로 연결하지만 입력 3핀중에 1핀을 아두이노 공급전원쪽 또는 Vin 단자에 연결해야 합니다.
이 컨버터는 대회용 라인트레이서에 많이 사용하는데 라인트레이서 로봇인 라인코딩 제품은 출력3핀이 배터리 입력단자와 연결되어 있어 컨버터를 바로 연결하여 사용합니다.
보통 대회용은 서보모터 1개에 서보컨버터 1개를 사용 합니다.
가변저항으로 출력 전압을 조절해야 하는 DCDC컨버터 입니다.

추가로 아두이노에 전원을 공급하는 여러가지 방법 입니다.
자 이제 코딩으로 넘어갈까요!
서보모터 아두이노 구동은 검색하면 정말 많이 나옵니다.
버튼 입력에 따라 각도를 제어해 봅시다.

서보모터의 이동 각도를 점점 증가, 감소 하는 형태로 천천히 움직이는 효과를 만들어 봅시다.
서보모터 각도 제어하는건 알겠는데 어디다 쓰지요?
서보모터로 만든 로봇팔 입니다.
서보모터로 만든 휴머노이드
검색해보면 RC서보모터는 다양한 곳에서 사용하고 있습니다.
관련 상품
")
")
배송안내
1. 배송비 : 기본배송료는 10,000원 미만 구입 시 3,200원, 100,000원 이상 2,000원 입니다.
(도서,산간,오지 일부지역은 배송비가 추가될 수 있습니다)
2. 평균 배송일은 2~4 일입니다.(입금 확인 후) 설치 상품의 경우 다소 늦어질수 있습니다.[배송예정일은 주문시점(주문순서)에 따른 유동성이 발생하므로 평균 배송일과는 차이가 발생할 수 있습니다.]
3. 오픈 초기라 배송기간기 길지만 열심히 노력하여 단축하도록 하겠습니다.
4. 제주도및 기타 섬지역은 항공료 3,000원이 추가 됩니다.
환불안내
| 제품 수령 후 7일(주말/공휴일 포함)이내 다음 사항의 경우 취소, 교환, 환불, AS 가능합니다. |
|---|
| [취소, 교환, 환불, AS 가능] 1. 수령한 제품의 불량, 파손, 오 배송 등으로 사용이 불가한 경우 2. 고객변심인 경우 제품 포장을 개봉하지 않고, 사용하지 않은 상태인 경우 3. 제품 불량으로 확인되어 수령일 기준 7일이내 (주말/공휴일 포함) 취소, 교환, 환불, AS를 요청하는 경우 |
[취소, 교환, 환불, AS 불가] |
이미지 확대보기mg995 호환 서보모터 메탈기어 로봇, arduino uno diy 용



비밀번호 인증
글 작성시 설정한 비밀번호를 입력해 주세요.
장바구니 담기
상품이 장바구니에 담겼습니다.
바로 확인하시겠습니까?
찜 리스트 담기
상품이 찜 리스트에 담겼습니다.
바로 확인하시겠습니까?

서울특별시 구로구 공원로 41 (현대파크빌) 811호
- 대표 :
- 이준기
- 사업자등록번호 :
- 120-37-00727 사업자번호조회 >
- 통신판매업신고번호 :
- 2021-서울구로-2141
- 개인정보관리자 :
- 이준기
- 메일 :
- 엔에이치엔고도(주)
copyright (c) www.ssmaker.co.kr all rights reserved.
customer center
070-5167-3321평일 10 : 00 ~ 17 : 00
bank
14417609512001우리은행
예금주 : 이준기

